

Case Study Information
Developing stand-off chemical identification systems for hazardous nuclear environments
IS-Instruments, working in partnership with Amentum (formerly Wood / Jacobs) and i3D robotics, developed an advanced stand-off Raman system designed for the remote identification of hazardous substances within nuclear facilities.
The project focused on enabling rapid, non-contact chemical identification in environments where direct human access may be restricted or unsafe. By combining Raman spectroscopy, spatial heterodyne spectroscopy (SHS), robotic deployment, and 3D stereo vision, the system demonstrated the ability to identify chemicals of interest at stand-off distances of approximately one metre.
The Challenge
The decommissioning of legacy nuclear facilities presents significant technical, environmental, and operational challenges. Many facilities contain hazardous substances, degraded infrastructure, and radioactive materials that must be identified, characterised, and safely managed before decommissioning activities can proceed.
Traditional approaches often rely on visual inspection followed by manual sampling and laboratory analysis. These processes can be time-consuming, expensive, and potentially hazardous for operators.
An effective stand-off sensing system therefore needed to:
* Operate safely within harsh nuclear environments
* Function under conditions of radiation, humidity, and temperature variation
* Identify hazardous materials without direct contact
* Integrate with robotic inspection platforms
* Provide rapid measurements with minimal operator intervention
* Remain compact, lightweight, and deployable within complex facilities
The project also required the system to detect target materials approximately 200 µm in size within observation times of less than one minute.

Aerial view of the Sellafield site in Cumbria.
Image attribution: By Simon Ledingham, CC BY-SA 2.0, https://commons.wikimedia.org/w/index.php?curid=7938296
The Solution
To address these challenges, the project team developed a modular stand-off Raman sensing platform consisting of:
- A spatial heterodyne Raman spectrometer
- A remotely deployed Raman probe
- A fibre-coupled Raman excitation laser
- An ROV-mounted stereo vision system
The Raman probe and stereo imaging system were integrated onto a nuclear-hardened remotely operated vehicle (ROV). The stereo vision system enabled operators to locate potential target materials and optimise probe positioning using real-time ranging information.
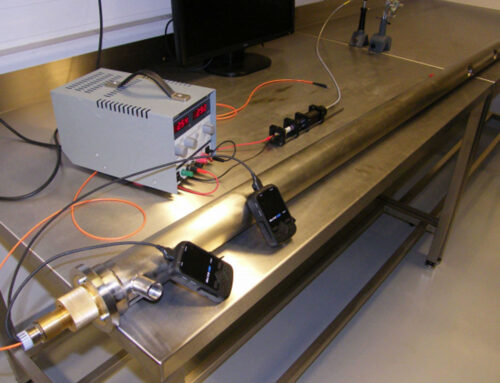
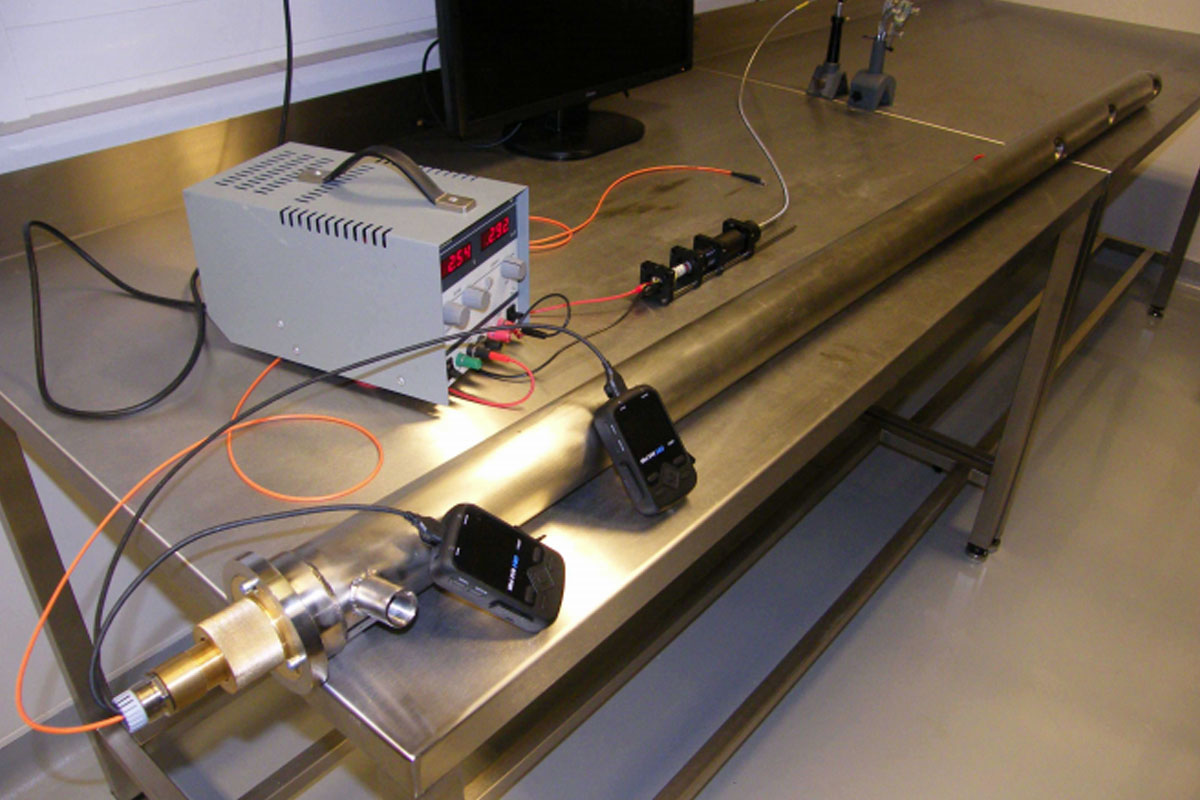
To protect sensitive optical and electronic components from harsh environmental conditions, the spectrometer and laser were positioned remotely outside the target environment and connected to the probe assembly via 15-metre fibre-optic cables.

Spatial Heterodyne Raman Spectroscopy
The system used a static Fourier Transform spectrometer based on spatial heterodyne spectroscopy (SHS).
Compared with conventional dispersive Raman systems, the SHS architecture offers substantially higher etendue, thereby enabling significantly greater light-collection efficiency while maintaining the required spectral resolution. This was particularly important for the project due to the weak nature of Raman scattering and the strict limitations on laser power density within nuclear environments.
Unlike traditional pulsed stand-off Raman systems, which may pose ignition risks, the system operated with a continuous-wave 785 nm laser configured to maintain a low power density at the target surface. The SHS design also provided additional robustness advantages through the absence of moving parts.
Robotic Deployment and Vision Integration
The stand-off Raman probe was integrated onto the Wood ROV022 nuclear inspection platform alongside a stereo camera system supplied by i3D robotics.
The ROV platform provided high mobility within constrained environments and enabled remote deployment into hazardous facilities with restricted access. Stereo vision data supported target identification, ranging, and optimisation of the Raman probe working distance, improving signal quality and measurement reliability.
Experimental Testing
The system was tested against a range of materials relevant to nuclear decommissioning and fuel processing applications, including:
- Versamag
- Magnox sludge simulant
- Uranyl nitrate
- Tri-butyl phosphate (TBP)
- Kerosene
The instrument successfully identified target substances at a stand-off distance of approximately 1 m in a nuclear test facility environment.
The graphs below show the Raman spectra of chemicals measured by the new Raman system.

Project Outcome
The project demonstrated the successful integration of Raman spectroscopy, robotic deployment, and 3D vision technologies for remote chemical identification within hazardous nuclear environments.
By combining high-etendue SHS instrumentation with fibre-coupled deployment and robotic inspection systems, the platform enabled stand-off Raman measurements while minimising exposure risks and reducing the need for direct human intervention.
The work also demonstrated the potential for advanced Raman sensing systems to support future nuclear decommissioning, hazardous material characterisation, and remote inspection applications.
Project Partners and Funding
The project was funded by Innovate UK and managed by FIS360 through the Game Changers programme in partnership with Sellafield Ltd and National Nuclear Laboratory.
IS-Instruments collaborated with i3D robotics and Amentum (formerly Wood Nuclear / Jacobs) throughout the project.
Further Information
Published scientific paper available via Wiley.

{kind=link}
{kind=link}